Roboter aus weichen Materialien bieten eine hohe Flexibilität. Die Nachgiebigkeit des Materials führt zu einer erhöhten Anpassungsfähigkeit, die klassische Robotersysteme nicht bieten können. Entsprechend entwickelte Roboter können sich ihrer Umgebung anschmiegen, ohne dass es zu einer Beschädigung am Roboter, an der Umgebung oder den zu handhabenden Objekten kommt. Softe Roboter bieten somit Vorteile in der industriellen Mensch-Roboter-Kollaboration und der Greiftechnik. Aber auch in der Medizintechnik können softe Roboter verwendet werden, um beispielsweise bei minimalinvasiven Eingriffen die Verletzungsgefahr des umliegenden Gewebes zu reduzieren.
Mit der erhöhten Flexibilität gehen jedoch auch neue Herausforderungen einher. Im Rahmen des DFG-Schwerpunktprogramms „Soft Material Robotic Systems“ (SPP2100) forscht das match zur Modellierung weicher Roboter sowie zur Regelung und Sensorik.
Druckregelung und Sensorik für softe Roboter
Anders als ihre Gegenstücke aus harten Materialien wie Stahl besitzen softe Roboter theoretisch unendlich viele Bewegungsfreiheiten. Da nicht jede Freiheit individuell geregelt werden kann, handelt es sich bei soften Robotern um hochgradig unteraktuierte Systeme, wobei die Aktuierung auf unterschiedlichste Weise erfolgen kann – etwa mit Seilzugkinematiken, pneumatisch gesteuerten Aktoren und weichen dielektrischen Elastomeraktoren, um nur einige Beispiele zu nennen.
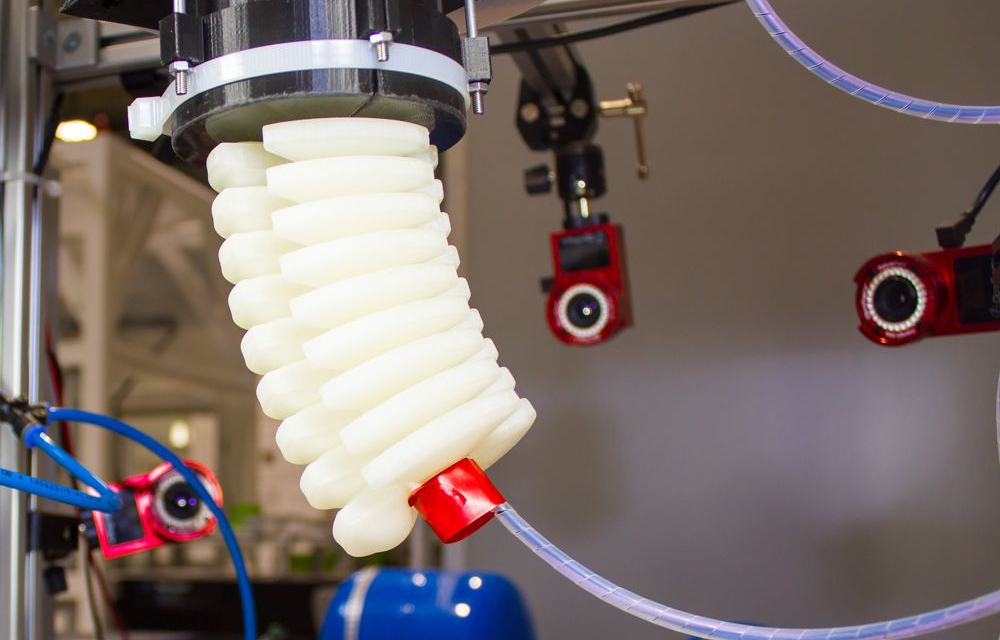
Das match erforscht softe pneumatische Aktoren: Weiche Elastomerkörper mit integrierten Hohlräumen werden dabei mit Druck beaufschlagt, wodurch sie sich verformen. Die Nichtlinearität der verwendeten Materialien und das damit einhergehende hochgradig nichtlineare Systemverhalten bergen einige Herausforderungen. Zu nennen sind dabei Hysterese, Hyperelastizität sowie Kriecheffekte des Materials. Hier forscht das match an geeigneten Regelungsansätzen, um trotzdem eine robuste und optimierte Druckregelung gewährleisten zu können.
Ein weiterer Forschungsschwerpunkt am match ist die Sensorik für weiche Roboter. Um die Roboter- beziehungsweise Aktorpose zu bestimmen sowie die Gesamtkörperdeformation zu erfassen, muss geeignete Sensorik in die Strukturen integriert werden. Ansätze sind hier beispielsweise Biegesensoren oder extrem dehnbare Dehnungsmesstreifen, die auf Flüssigmetalllegierungen basieren. Die Herausforderung dabei ist es, die Beweglichkeit des Aktors durch die Sensorintegration nicht einzuschränken, gleichzeitig aber möglichst viele Informationen aus den verwendeten Sensoren zu ziehen.
Modellierung und Design weicher Roboter
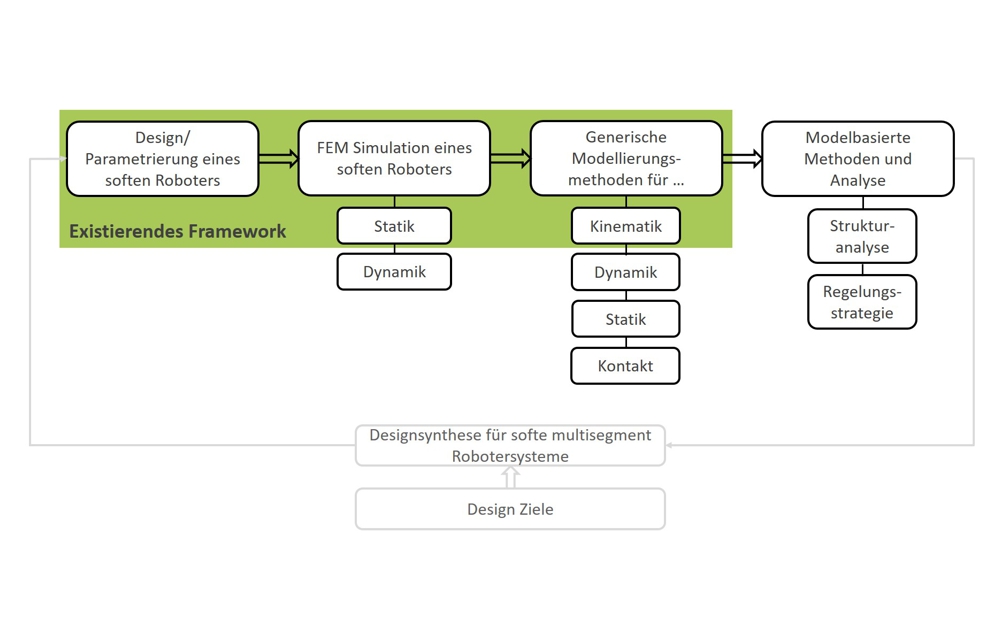
Ein weiterer großer Forschungsschwerpunkt am match ist die Modellierung. Derzeit werden softe Robotersysteme entweder analytisch modelliert, wobei dies aufwendig für jedes individuell entwickelte Design geschieht, oder es kommen numerische Modellierungsmethoden wie die Finite-Elemente-Methode (FEM) zum Einsatz, die für zeitkritische Anwendungen wie eine modellbasierte Regelung allerdings meist zu rechenintensiv sind.
Eine Alternative entwickelt das match im Rahmen des DFG-Schwerpunktprogramms zusammen mit dem Institut für Dynamik und Schwingungen (IDS) und dem Institut für mechatronische Systeme (imes). Gemeinsam arbeiten die Wissenschaftler an einer kohärenten Methodologie zur Modellierung und zum Entwurf weicher Roboter. Das gemeinsame Projekt zielt darauf ab, einen umfassenden Methodenbaukasten für softe Roboter zu entwickeln, der für verschiedenste Designs und in verschiedensten Anwendungsszenarien zum Einsatz kommen kann. Dies umfasst insbesondere die generische Erstellung von Modellen zur Beschreibung der Kinematik sowie des statischen und des dynamischen Verhaltens, auch unter der Berücksichtigung des Kontaktes mit der Umgebung. Alle Methoden werden in ein standardisiertes und einfach zu bedienendes Framework überführt.
Die entwickelten Methoden können anschließend für die Regelung eines soften Roboters oder für eine Charakterisierung des Systems verwendet werden. Die Designanalysen können zukünftig auch für die modellbasierte Entwicklung softer Robotersysteme herangezogen werden.
Enge Zusammenarbeit im Schwerpunktprogramm
Zwölf Forschungsgruppen aus ganz Deutschland beteiligen sich am SPP2100 und setzen in ihren Projekten unterschiedliche Schwerpunkte – vom Design weicher Aktorsystemen über die Modellierung weicher Komponenten bis hin zur Regelung und Sensorik für softe Robotersysteme. Das match koordiniert das gesamte Projekt und organisiert beispielsweise regelmäßige Treffen und Workshops mit den beteiligten Forschungsgruppen. Darüber hinaus baut das match eine Infrastruktur für den Datenaustausch auf und organisiert Sommerschulen für die am Projekt beteiligten Wissenschaftler, Doktoranden sowie weitere Interessierte. Ein intensiver Austausch und eine enge Zusammenarbeit zwischen den einzelnen Projekten z ist für ein Schwerpunktprogramm enorm wichtig – nicht nur, weil am Ende mehrere Demonstratoren entstehen sollen, die die Arbeit und die Ergebnisse einzelner Forschungsprojekte zusammenführen.
Weitere Informationen zum Schwerpunktprogramm „Soft Material Robotic Systems“ erhalten Interessierte unter www.spp2100.de.